ДЋЭГЕФХЉЬяЙћдАЗРгљФёКІЕФЗНЗЈгаКмЖрБзЖЫЃЌФбвдзіЕНгааЇЗРгљЁЃБОЮФГЂЪдНЋЛњЦїЪгОѕв§ШыЕНЙћдАЗРФёЯЕЭГжЎжаЃЌЭЈЙ§МьВтЪгЦЕЭМЯёРДХаЖЯгаЮоЗЩФёШыЧжЁЃВЂВЩгУБГОАВюЗжЫуЗЈЃЈBackground SubtractionЃЉЗжИювЦЖЏФПБъвдМАдЫааЦкОљжЕЗЈЃЈRunning AverageЃЉЫуЗЈИќаТБГОАЁЃОЙ§ЪЕбщ
1 в§бд
ЙћХЉгУЙћЪЕЬзДќЁЂМмЩшЗРФёЭјЕШДЋЭГЗНЗЈЃЌПЩвдЦ№ЕНвЛЖЈЕФЧ§ИЯаЇЙћЁЃЕЋЪЧИїгаБзЖЫЃЌВЂЧвЗбЪБЗбЙЄЁЃЬзДќжЛФмЖдЦЯЬбЁЂЦЛЙћЁЂРцЕШгааЇЙћЃЌЖдгЃЬвЁЂРЖнЎЕШВЛЬЋЪЪгІЁЃЗРФёЭјМШЪЪгУгкДѓУцЛ§ЕФЙћдАЃЌвВЪЪгУгкУцЛ§аЁЕФЙћдАЃЌЕЋЗРФёЭјЦНОљУПФЖГЩБОНЯДѓЃЌЖјЧвЪЙгУЪйУќЖЬЃЌУПФъЙћзгВЩЪеКѓБиаыЪеЦ№РДЃЌБШНЯЗбЙЄЁЃНќРДЙњФкгааЉЕиЗНПЊЪМЪЙгУгЩХЉвЕВПаХЯЂЛЏжааФзЈМвбажЦЕФжЧФмгявєЧ§ФёЦїЃЌЖдЧ§ФёгаНЯКУЕФаЇЙћЁЃ
БОЮФГЂЪдНЋЛњЦїЪгОѕв§ШыЕНЙћдАЗРФёЯЕЭГжЎжаЃЌЪЕЯжжЧФмМрПиЁЃЛњЦїЪгОѕОЭЪЧгУИїжжГЩЯёЯЕЭГДњЬцЪгОѕЦїЙйзїЮЊЪфШыУєИаЪжЖЮЃЌгЩМЦЫуЛњРДДњЬцДѓФдЭъГЩДІРэКЭНтЪЭЁЃ
дЫЖЏФПБъМьВтЕФЫуЗЈвРееФПБъгыЩуЯёЛњжЎМфЕФЙиЯЕПЩвдЗжЮЊОВЬЌБГОАЯТдЫЖЏМьВтКЭЖЏЬЌБГОАЯТдЫЖЏМьВтЃЌБОЮФжЛЬжТлОВЬЌБГОАЯТдЫЖЏМьВтЁЃ
2 ГЬађЩшМЦгыРэТлЛљДЁ
ГЬађЩшМЦСїГЬШчЭМ1ЫљЪОЁЃ
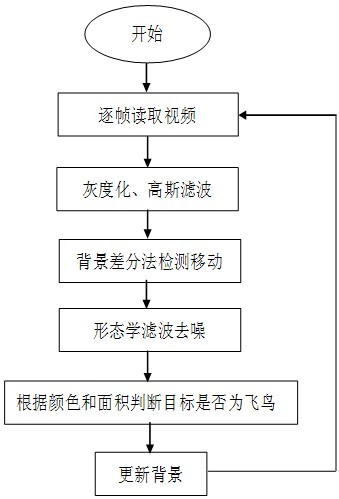
ЭМ1 ГЬађЩшМЦСїГЬ
2.1 ИпЫЙТЫВЈ[1]
дкЭМЯёДІРэжаЃЌЭЈЙ§ИпЫЙКЏЪ§НјааЕЭЭЈТЫВЈШЅдыЩљОпгаживЊЕФгІгУМлжЕЁЃЫфШЛНќФъРДЗЂеЙСЫЖржжЖрбљЕФдыЩљЧхГ§ЫуЗЈЃЌЕЋИпЫЙТЫВЈгЩгкОпгаНЯКУЕФЦНЛЌаЇЙћКЭСщЛюЕФТЫВЈЕїНкГпЖШЃЌЧвЭЈЙ§ПьЫйИЕРявЖБфЛЛЪЙЕУТЫВЈаЇТЪКмИпЃЌвђДЫИпЫЙКЏЪ§ТЫВЈШдШЛгІгУдкКмЖрЭМЯёДІРэКЭФЃЪНЪЖБ№жаЃЌЧвКмЖраТЕФЫуЗЈЖМНЋЦфзїЮЊОЕфЕФвжжЦдыЩљЕФЫуЗЈРДБШНЯЁЃИпЫЙКЏЪ§ШчЯТЃК
 ЃЈ1ЃЉ
ЃЈ1ЃЉ2.2 Ъ§бЇаЮЬЌбЇ[2-4]
Ъ§бЇаЮЬЌбЇЪЧЛљгкаЮзДМЏКЯРэТлЖјЬсГіЕФЃЌЦфдЫЫуБОжЪЩЯЪЧВЂааЕФЃЌБугкВЂааДІРэЪЕЯжЁЃгУЪ§бЇаЮЬЌбЇЫузгЖдЭМЯёНјааЪЖБ№ДІРэЃЌВЛашМЦЫуУПЕуЕФОжВПЬиеїЃЌЗНЗЈМђЕЅЫйЖШПьЃЌЧвПЙдыФмСІБШНЯЧПЃЌвђЖјЪЪКЯЮЊдЫЖЏЭМЯёађСажаФПБъЖдЯѓЕФКѓЗжИюЫљВЩгУЁЃдкЪ§бЇаЮЬЌбЇжагаЫФИізюЛљБОЕФЫузгЃКИЏЪДЁЂХђеЭЁЂПЊКЭБеЁЃ
2.2.1 ИЏЪДКЭХђеЭ
ИЏЪДКЭХђеЭЪЧзюЛљБОЕФаЮЬЌбЇдЫЫуЃЌЫќУЧЛЅЮЊЖдХМдЫЫуЁЃИЏЪДОпгаЪеЫѕЭМЯёЕФзїгУЃЌХђеЭОпгаРЉДѓЭМЯёЕФзїгУЁЃЩшXКЭBЮЊЖўЮЌПеМфжаЕФСНИіМЏКЯЁЃЖдгкЖўжЕЭМЯёЃЌЩшX(b)БэЪОЦНвЦbЖјЕУЕНЕФЭМЯёЃЌМДЃК
(Xb)={y|y=x+b, x∈b} ЃЈ2ЃЉ
дђИЏЪДКЭХђеЭЕФЖЈвхЗжБ№ЮЊ
ИЏЪДЃК
 ЃЈ3ЃЉ
ЃЈ3ЃЉ ХђеЭЃК
 ЃЈ4ЃЉ
ЃЈ4ЃЉ ЖдгкЛвЖШЭМЯёЃЌЖЈвхШчЯТЃК
ИЏЪДЃК
 ЃЈ5ЃЉ
ЃЈ5ЃЉ ХђеЭЃК
 ЃЈ6ЃЉ
ЃЈ6ЃЉ ЦфжаΩЮЊНсЙЙдЊЫиBЕФжЇГХМЏЁЃ
2.2.2 ПЊдЫЫуКЭБедЫЫу
ПЊКЭБедЫЫуЪЧЛљгкИЏЪДКЭХђеЭдЫЫуЛљДЁЩЯЕФЁЃПЊЖЈвхЮЊЯШИЏЪДКѓХђеЭЃЌБеЮЊЯШХђеЭКѓИЏЪДЃЌМД
ПЊЃК
 ЃЈ7ЃЉ
ЃЈ7ЃЉ БеЃК
 ЃЈ8ЃЉ
ЃЈ8ЃЉ ЖўжЕЭМЯёКЭЛвЖШЭМЯёЕФПЊКЭБедЫЫуЙ§ГЬЯрЭЌЁЃПЊдЫЫугаФЅЙтЭЙЯђЭМЯёЭтВПМтНЧЕФзїгУЃЌБедЫЫугаФЅЙтЭЙЯђЭМЯёФкВПМтНЧзїгУЃЌСэЭтПЊБедЫЫувВОпгаТЫВЈаджЪЁЃ
2.3 дЫЖЏФПБъМьВт
дЫЖЏФПБъМьВтЪЧећИіжЧФмМрПиЙћдАЗРФёЯЕЭГЕФЛљДЁЁЃОВЬЌБГОАЯТдЫЖЏФПБъМьВтЗНЗЈжївЊгаШ§жжЃЌЫќУЧЪЧЃКжЁМфВюЗжЗЈ[5-7]ЁЂБГОАВюЗжЗЈ[7]КЭЙтСїЗЈ[8]ЁЃ
ЙтСїЗЈМЦЫуИДдгЃЌВЛЪЪвЫЪЕЪБДІРэЃЛжЁМфВюЗжЗЈЪЧНЋСЌајСНжЁНјааБШНЯЃЌДгжаЬсШЁГідЫЖЏФПБъЕФаХЯЂЃЌетжжЬсШЁГідЫЖЏФПБъЕФЭъећадНЯВюЃЌЕЋЖдЖЏЬЌЛЗОГгаНЯКУЕФЪЪгІадЃЛБГОАВюЗжЗЈФмЙЛНЯЭъећЕиЬсШЁФПБъЕуЃЌЕЋЖдГЁОАЕФЖЏЬЌБфЛЏЃЈШчЙтееЛђЭтВПЬѕМўв§Ц№ЕФГЁОАБфЛЏЃЉНЯЮЊУєИаЁЃ
ЯТУцЯъЯИЕиНщЩмвЛЯТБГОАВюЗжЗЈЁЃ
2.3.1 БГОАВюЗжЗЈЛљБОИХФю
БГОАВюЗжЗЈЃЈBackground SubtractionЃЉВЩгУЕБЧАЭМЯёгыБГОАЭМЯёЭЌЮЛжУЯёЫиССЖШЯрМѕЕФЗНЪННјааЧАОАФПБъМьВтЁЃ
2.3.2 БГОАВюЗжЗЈЗНЗЈдРэ
ЖЈвхЪфШыЭМЯёађСаЮЊf1(x,y)ЃЌf2(x,y)ЃЌ…ЃЌfn(x,y)ЃЌfk ЁЂBkЗжБ№ДњБэЕБЧАЪгЦЕжЁКЭБГОАжЁЃЌдђВюЗжКѓЭМЯёПЩБэЪОЮЊЃК
 ЃЈ9ЃЉ
ЃЈ9ЃЉ ЪНжаЃЌЃЈxЃЌyЃЉЮЊЯёЫиЕФПеМфзјБъЁЃЖдВюЗжКѓЭМЯёНјаауажЕЛЏДІРэМДПЩЕУЕНЧАОАФПБъДІРэКѓЕФНсЙћЭМЯёЮЊ
 ЃЈ10ЃЉ
ЃЈ10ЃЉ ЪНжаTHЮЊДІРэЩшЖЈЕФуажЕЃЌМДЕБВюЗжЭМЯёжаФГвЛЯёЫиДѓгкЩшЖЈуажЕЪБЃЌдђШЯЮЊЪЧЧАОАЯёЫиЃЌЗёдђЮЊБГОАЯёЫиЁЃ
ИУЫуЗЈМђЕЅЁЂвзааЁЂгааЇЃЌФмЙЛНЯЭъећЕФЬсШЁФПБъЕу ЕЋЪЧЖдЙиееБфЛЏУєИаЃЌдЫЖЏФПБъЕФвѕгАвВГЃГЃБЛЮѓМьЮЊФПБъЃЌдкЪЕМЪгІгУжавЊПМТЧНјаавѕгАМєГ§ДІРэЁЃ
2.4 БГОАЙЙНЈКЭИќаТ
ЖдгкОВЬЌБГОАЯТЕФдЫЖЏФПБъМьВтЃЌЛёШЁБГОАЭМЯёзюМђЕЅЕФЗНЪНЪЧдкУЛгадЫЖЏЮяЬхЕФЧщПіЯТХФЩуБГОАЭМЯёЛђепДгЪгЦЕађСажабЁШЁВЛКЌЧАОАФПБъЕФжЁЁЃЕЋдкЪЕМЪжаЃЌБГОАЭљЭљЛсЗЂЩњБфЛЏЃЌШчГЁОАжаЙтееЕФБфЛЏЃЌБГОАжаОАЮяЕФБфЛЏКЭЩуЯёЛњЮЛжУЕФЦЋвЦЕШЃЌвђДЫетжжЗНЗЈЫфМђЕЅШДВЛФмгУгкГЄЦкКЭЩдЮЂИДдгЕФГЁОАЁЃ
БГОАжиЙЙЕФЗНЗЈжївЊгаЭГМЦЦНОљЗЈ[9-10]КЭЛљгк RGB беЩЋПеМфЕФдЫЖЏФПБъМьВтЫуЗЈЃЌБОЮФВЩгУЧАепЁЃ
ЭГМЦЦНОљЗЈЭЈЙ§ЖдСЌајЕФЭМЯёађСаНјааЭГМЦЦНОљРДЛёЕУБГОАЭМЯёЃЌМДВЩгУСЌајNжЁЭМЯёРлМгЧѓЦНОљЃК
 ЃЈ11ЃЉ
ЃЈ11ЃЉ ЪНжаNЮЊНјааЦНОљЕФЭМЯёЕФжЁЪ§ЃЌвЛАуРДНВЃЌNдНДѓдНгаРћгкЕУЕНвЛИіИќЮЊНгНќЪЕМЪБГОАЕФЙРМЦжЕЁЃЙЋЪНЃЈ11ЃЉПЩвдЕШМлГЩЃК
 ЃЈ12ЃЉ
ЃЈ12ЃЉ МДаТЕФБГОАПЩРћгУЩЯвЛДЮЙРМЦжЕBk-1 ЁЂЕБЧАжЁfk вдМАfk-NЕнЭЦЕУЕНЁЃетжжИќаТЗНЗЈдкУПДЮИќаТЪБПМТЧЕНРћгУЕБЧАжЁжаЕФБГОАаТЯЂЖјЗЯЦњСЫЙ§ЪБЕФОЩаХЯЂЃЌДгЖјгаРћгкБГОАздЪЪгІЕиИњЫц“аТЛЗОГ”ЕФБфЛЏЖјБфЛЏЁЃИУЗНЗЈМђЕЅШнвзЪЕЯжЃЌЭЌЪБгЩгкВЩгУЕнЭЦЫуЗЈЃЌвђЖјЪБМфПЊЯњаЁЁЃИУЗНЗЈЕФШБЕуЪЧашвЊБЃДцвбОВЩМЏЕНЕФ жЁЭМЯёЪ§ОнЃЌдіМгСЫЖдДцДЂПеМфЕФПЊЯњЁЃ
СэвЛжжБГОАИќаТЗНЗЈГЦЮЊдЫааЦкОљжЕЗЈЃЈRunning AverageЃЉЃЌЦфЫМЯыЪЧЭЈЙ§в§ШЫбЇЯАТЪРДЬхЯжБГОАЭМЯёЖдГЁОАБфЛЏЕФЯьгІЁЃЭЈГЃШЁ0.05ЃЌЖјдНЕЭЃЌЧАОАБфЛЏЖдБГОАЕФгАЯьдНаЁЁЃ
 ЃЈ13ЃЉ
ЃЈ13ЃЉ ЩЯЪНБэУїдкаТвЛжЁжаЃЌгУБГОАЯёЫиИќаТдБГОАЃЌЖјЧАОАЯёЫиДІБГОАдђгУдРДжЕЬцДњЃЌЪНжа (x,y)ЮЊЯёЫиЕФПеМфЮЛжУЃЌTHЮЊЛЎЗжБГОАгыЧАОАЯёЫиЕФуажЕЁЃ
3 ЪЕбщНсЙћ
вдЯТЪЧСЌајЕФ3ИіAVIИёЪНЪгЦЕађСаЃЌДІРэКѓЕУЕНЕФБГОАЭМЁЂЧАОАЭМКЭФПБъТжРЊЭМВЮМћЭМ2~ЭМ5ЁЃ

ЭМ2 дЪгЦЕађСа
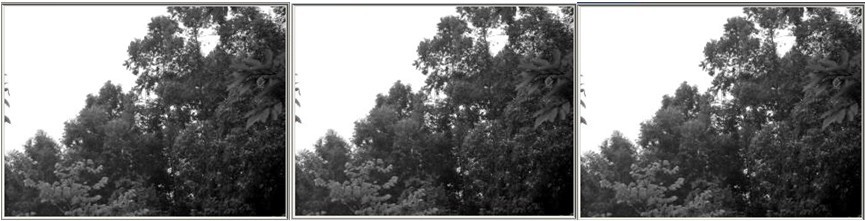
ЭМ3 БГОАЭМ

ЭМ4 ЧАОАЭМ

ЭМ5 ИњзйФПБъТжРЊЭМ
4 НсТл
ЪЕбщБэУїЃЌИУЫуЗЈФмгааЇМьВтЕНвЦЖЏФПБъЁЃШчЙћЪгЦЕБГОАБфЛЏКмДѓЃЌИУЫуЗЈЛсВњЩњБШНЯДѓЕФдыЩљЃЌгАЯьФПБъЪЖБ№ЃЌЕЋЪЧЭЈЙ§МьВтRGBЗжСПЃЌЖдЬсИпЪЖБ№ОЋЖШгавЛЖЈЕФАяжњЁЃ
ВЮПМЮФЯз
[1] ЭѕЮФдЖ. ЛљгкЭМЯёаХдыБШбЁдёгХЛЏИпЫЙТЫВЈГпЖШ[J].ЕчзггыаХЯЂбЇБЈ
[2] еТиЙНњ.ЭМЯёДІРэЙЄГЬЩЯЃКЭМЯёКЭЗжЮі[M]ЃЌББОЉЃКЧхЛЊДѓбЇГіАцЩчЃЌ1999
[3] ХЗбєЦНЃЌеХгёЗН.аЮЬЌбЇПЊБедЫЫудкОгУёЕиБпдЕМьВтжаЕФгІгУ[J]. ВтЛцЭЈБЈ.2009
[4] ВмЬэ.ЛљгкЪ§бЇаЮЬЌбЇЕФГЌЩљЭМЯёдіЧПЬНЮі[J].ММЪѕгыЪаГЁ.2009
[5] Anderson CЃЌBert PЃЌVander Wal G. Change detection and tracking using pyramids transformation techniques[A]. InЃК Proceedings of SPIE Conference on Intelligent Robots and Computer Vision [C] CambridgeЃЌMAЃЌUSAЃЌ1985ЃЌ579ЃК7 2-78
[6] Lipton AЃЌFujiyoshi HЃЌPatil R. Moving target classification and tracking from real-time video[A]. InЃК Proceedings of IEEE Workshop on Applications of Computer Vision[C ]ЃЌPrincetonЃЌN JЃЌUS AЃЌ1998ЃК8-14
[7] HARITAOGLU IЃЌDAVIS LARRY S etal. W4 who? when? where? what? A real time system for detecting and tracking people[A].InЃК Proceedings of IEEE International Conference on Automatic Face and Geture Recognition. NaraЃЌJapanЃЌ1998 [C]
[8] МЦЮФЦНЃЌЙљБІСњЃЌЖЁЙѓЙу.ЛљгкащФтЯпШІЕФЙтСїЗЈГЕСїСПМьВт[J].МЦЫуЛњЗТец.Vol.21ЃЌNo.1ЃЌ2004. 01ЃК109-110
[9] Cutler RЃЌDavis L.View-based detection [A].InЃК Proceedings of International Conference on Pattern Recognition[C]ЃЌBrisbaneЃЌAustraliaЃЌ1998ЃК495-500
[10] Cucchiara RЃЌPiccardi. MЃЌPrati A. Detecting moving objectsЃЌghostsЃЌand shadows in video streams[J]. IEEE Transactions on Pattern Analysis and Machine IntelligenceЃЌ2003ЃЌ25ЃЈ10ЃЉЃК1337-1342
ЪеИхШеЦкЃК3 дТ 16 Ше аоИФШеЦкЃК4 дТ 25 Ше
зїепМђНщЃКЛЦеёЃЈ1983-ЃЉЃЌФаЃЌЫЖЪПЃЌбаОПЗНЯђЮЊЭМЯёЪгЦЕДІРэгыЪЖБ№ЃЛРюШЋЃЈ1958-ЃЉЃЌФаЃЌИБНЬЪкЃЌбаОПЗНЯђЮЊЕчСІЭЯЖЏгыжЧФмПижЦРэТлЁЃ
(д№ШЮБрМЃКФЯдСТлЮФжааФ)зЊЬљгкФЯдСТлЮФжааФ: http://www.nylw.net(ФЯдСТлЮФжааФ__ДњаДДњЗЂТлЮФ_БЯвЕТлЮФДјаД_ЙужнжАГЦТлЮФДњЗЂ_ЙужнТлЮФЭјЃЉ
ЖЅвЛЯТ
(0)
0%
ВШвЛЯТ
(0)
0%
АцШЈЩљУїЃКвђБОЮФОљРДздгкЭјТчЃЌШчЙћгаАцШЈЗНУцЧжЗИ,ЧыМАЪБСЊЯЕБОеОЩОГ§.