摘 要 本文介绍了采用DSP控制器TMS320C240来实现智能球型摄像机云台机构中步进电机的加减速控制,论述了采用指数曲线来实现步进电机加减速的方法,实践表明该系统运行可靠、控制准确,达到预期的设计效果。
1 引言
本系统的设计背景是基于对安防监控中智能球型摄像机云台运动机构的控制。云台需要水平和垂直方向运动来实现摄像机监控对象和范围的变化,而步进电机是驱动智能球型摄像机云台进行水平和垂直运动的动力源泉。为了实现摄像机的准确定位,同时保证摄像机转动中图像的连续性,需要对步进电机的速度进行控制。
步进电机是一种将电脉冲信号变换成相应的角位移或直线位移的机电执行元件。步进电机驱动云台执行机构从一个位置移动到另一个位置时,一般要经历升速、恒速和减速过程。如果启动时一次将速度升到给定速度,由于启动频率超过极限启动频率,步进电机要发生失步现象,因此造成不能正常启动。如果到终点时突然停下来,由于惯性作用,步进电机会发生过冲现象,会造成位置精度降低。因此,设计合理的步进电机加减速曲线对系统的稳定运行十分重要。
2 加减速曲线的设计
2.1 加减速曲线的选择
步进电机的加减速曲线常用的有:匀加减速曲线、指数规律加减速曲线、S 型加减速曲线,如图 1所示,图中 为启动频率。匀加减速曲线适用于控制系统处理速度较慢且对加速过程要求不高的场合;指数和S 型加速曲线适用于控制系统处理速度快且对加速过程要求较高的场合。
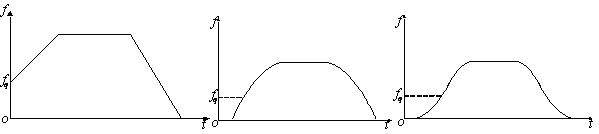
图1 加减速运行曲线
通过对以上加减速控制方法的比较,考虑到系统对云台移动速度、移动时间要求,以及实现编程的难易程度等综合因素,最终系统选用指数规律加减速控制曲线来实现步进电机加减速控制。
2.2 步进电机指数曲线加减速控制的方法
基于TMS320F240的步进电机控制系统基本工作原理是:DSP发出的控制命令经过缓冲器送给A3979,控制A3979相应端口的电平就可以实现对步进电机运转的方向和速度的控制,即给一个脉冲步进电机转动一步。TMS320F240也称为DSP控制器,是TI公司专门针对电机、逆变器、机器人、数控机床等控制而设计的。A3979是Allegro公司近年推出的一种带微步控制功能的步进电机驱动器,内置译码器。如图2为基于TMS320F240的步进电机控制系统结构框图。
步进电机指数曲线加减速控制设计的思路是:步进电机以带负载时适合的启动频率启动,通过改变定时器的定时时间来控制步进电机的运行频率,按照适合系统特性的指数曲线升降频,在运行的中间阶段以最大运行频率匀速运行,最终实现快速、精确的定位。
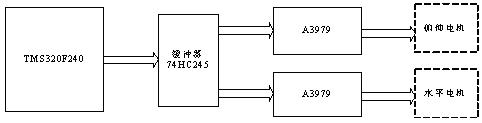
图2 步进电机控制系统结构框图
图3是近似指数加速曲线。由图可见,离散后速度并不是一直上升的,而是每升一级都要在该级上保持一段时间,因此实际加速轨迹呈阶梯状。步进电机在每个速度级保持的时间用步数来代替,本系统将水平方向电机的速度等级离散化为18级,垂直方向俯仰电机的速度等级离散化为6级(只取水平速度等级的前6级)。在编程之前,做了大量实验,在云台带负载的情况下,根据指数曲线的离散化方法,同时结合本系统所用电机的特性,对每个速度等级及对应步数进行逐级联调试验,最终得到每个速度等级所对应的加减速曲线数据(步进电机所需的频率和需要走的步数),并将每个速度等级所对应的步进电机频率值和对应的步数制成表(见表1),便于应用在步进电机加减速控制中。这里只给出了加速曲线处理的方法,减速曲线处理方法与加速曲线处理方法相同,只不过其过程是加速的逆过程。

图3 指数加速曲线离散化
表1 指数加速曲线离散化数据表
|
速度等级
|
频率/Hz
|
每级步数
|
速度等级
|
频率/Hz
|
每级步数
|
|
1
|
50
|
35
|
10
|
3224
|
400
|
|
2
|
165
|
45
|
11
|
3502
|
500
|
|
3
|
444
|
55
|
12
|
3780
|
510
|
|
4
|
722
|
80
|
13
|
4058
|
550
|
|
5
|
1000
|
160
|
14
|
4336
|
610
|
|
6
|
1556
|
200
|
15
|
4614
|
625
|
|
7
|
2112
|
250
|
16
|
4892
|
640
|
|
8
|
2560
|
310
|
17
|
5170
|
650
|
|
9
|
2946
|
370
|
18
|
5448
|
660
|
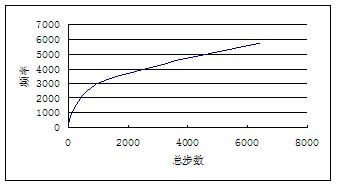
图4 步进电机加速曲线图
依据表1数据绘制出如图4所示步进电机加速曲线,经过与理想的指数曲线比较,发现两者相似。同时在云台平台上调试时,观察发现电机在加减速过程中无抖动、堵转和过冲现象。云台带动摄像机调用预置点时云台水平和垂直方向定位精确,图像清晰、稳定、无不连续现象。
2.3 软件设计
根据上述控制方法,本文设计了指数曲线加减速控制程序。在加减速阶段电机频率是变化的,可以通过改变TMS320F240的定时器初始值来实现。本文把每级频率对应的定时器初值和对应的步数存储在一个表里,这样单片机就可以通过查表来控制步进电机,使其按照指数曲线来进行升降速。前面已经提到减速过程是加速的逆过程,这里只给出了步进电机加速控制子程序流程图如图5所示。

图5 步进电机加速控制子程序流程图
3 结束语
步进电机的加减速控制的实现方法较多,本文结合智能球型摄像机控制系统的特点,采用指数曲线进行步进电机的加减速控制。经过实践检验,该系统具有软件编程简单、成本低、简单有效控制步进电机的速度等优点。
参考文献
[1] 钱平.伺服系统[M].第一版.北京:机械工业出版社,2005
[2] 王建,张玉峰,李磊.步进电机加减速控制技术研究[J].工矿自动化,2006
[3] 王晓明.电机的单片机控制[M].第一版.北京:北京航空航天大学出版社,2004
(责任编辑:南粤论文中心)转贴于南粤论文中心: http://www.nylw.net(南粤论文中心__代写代发论文_毕业论文带写_广州职称论文代发_广州论文网)
顶一下
(0)
0%
踩一下
(0)
0%
版权声明:因本文均来自于网络,如果有版权方面侵犯,请及时联系本站删除.